

Algoritmos matemáticos e esporte: criando atletas
Tabela de Conteúdos
- O incrível poder dos drones atletas
- Equilibrando uma Haste
- Equilibrando um copo
- Danificando o drone
- Drone tenista
- Kinect e Drone
- Interação física com o drone
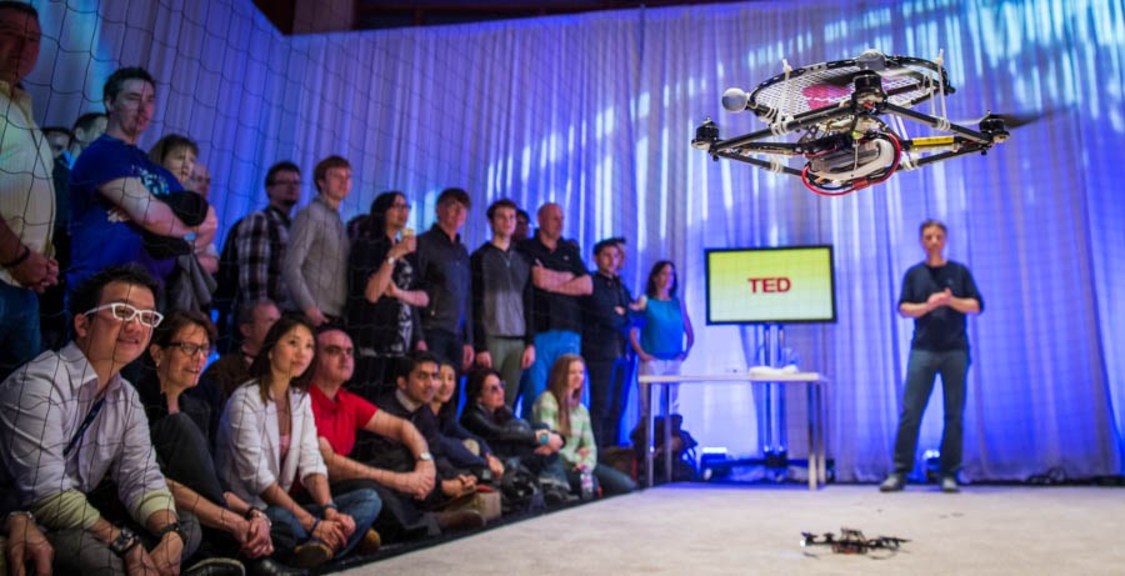
Recentemente estive fazendo algumas pesquisas e procurando sobre os algoritmos e aplicações dos drones, de forma que possibilitem uma nova abordagem e impactem de forma positiva a vida das pessoas. E encontrei um vídeo no TED, do Raffaello D’Andrea, mostrando quase aquilo que eu procurava.
O vídeo não faz a abordagem técnica que eu, como futuro cientista da computação procurava, ele utiliza de uma linguagem mais próxima para ser acessível às pessoas. Mas esta abordagem não torna o vídeo menos interessante, principalmente quando o drone começa a equilibrar uma haste, e até um copo de vidro com água sem deixar cair mesmo voando e efetuando algumas manobras no ar, em certo momento o drone passa a ser controlado com o corpo usando os sensores do Kinect, e há interação física. Vale a pena assistir:
Àqueles que não podem ver o vídeo, ou desejam ler para um melhor compreendimento, segue a transcrição do áudio:
O incrível poder dos drones atletas
Bem, o que significa para uma máquina ser atlética? Demonstraremos o conceito de atletismo da máquina e a pesquisa para alcançá-lo com o auxílio destas máquinas voadoras, chamadas quadricópteros, ou, na abreviação, ‘quads’.
Os ‘quads’ têm estado por aí durante um longo tempo. A razão por que eles são tão populares hoje é que são mecanicamente simples. Controlando as velocidades destes quatro propulsores, estas máquinas podem rolar, arfar, guinar e acelerar junto com uma orientação comum. A bordo, há também uma bateria, um computador, vários sensores e rádios sem fio. Os ‘quads’ são extremamente ágeis, as essa agilidade tem um custo.
Eles são inerentemente instáveis e precisam de alguma forma de controle automático de retroalimentação para que sejam capazes de voar. Então, como ele fez isso? Câmeras no teto e um laptop atuam como um sistema interno de posicionamento global. É usado para localizar, no espaço, objetos que têm estes marcadores refletivos neles. Esses dados são enviados para outro laptop que está calculando estimativas e algoritmos de controle, e, por sua vez, envia comandos para o ‘quad’, que também está calculando estimativas e algoritmos de controle.
O foco de nossa pesquisa são os algoritmos. É a mágica que dá vida para estas máquinas. Então, como alguém projeta os algoritmos que criam a máquina atleta? Usamos algo amplamente chamado de projeto baseado no modelo. Primeiro capturamos a física com um modelo matemático de como as máquinas se comportam. A seguir, usamos um ramo da matemática chamado teoria do controle para analisar esses modelos e também para sintetizar
algoritmos para controlá-las. Por exemplo, é assim que podemos fazer o ‘quad’ pairar: primeiro capturamos a dinâmica com um conjunto de equações diferenciais. Então, trabalhamos essas equações com o auxílio a teoria do controle para criar algoritmos que estabilizam o ‘quad’.
Equilibrando uma Haste
Permitam-me demonstrar o poder desta abordagem. Suponha que queiramos que este ‘quad’ não só paire, mas também equilibre esta haste. Com um pouco de prática, é bem simples para um ser humano fazer isso, mesmo porque temos a vantagem de ter dois pés no chão e usar nossas mãos muito versáteis. Fica um pouquinho mais difícil quando eu tenho só um pé no chão e quando não uso minhas mãos. Note que esta haste tem um marcador refletivo no topo, o que significa que ela pode ser localizada no espaço. Vocês podem observar que este ‘quad’ está fazendo ajustes mínimos para manter a haste equilibrada. Como projetamos os algoritmos para fazer isso? Acrescentamos o modelo matemático da haste ao do ‘quad’. Quando temos um modelo do sistema combinado da haste e do ‘quad’, podemos usar a teoria do controle para criar algoritmos para controlá-lo. Aqui, você vê que ele está estável, e, mesmo que haja pequenos deslocamentos, ele volta para a posição de equilíbrio.
Podemos também aumentar o modelo para incluir onde queremos que o ‘quad’ esteja no espaço. Usando este ponteiro, feito de marcadores refletivos, posso apontar para onde quero que o ‘quad’ esteja no espaço, a uma distância fixa de mim. A chave para estas manobras acrobáticas são os algoritmos, projetados com a ajuda de modelos matemáticos e teoria do controle. Vamos dizer ao ‘quad’ que volte aqui e deixe a haste cair, e, a seguir, demonstrarei a importância de entender modelos físicos e o funcionamento do mundo físico.
Equilibrando um copo
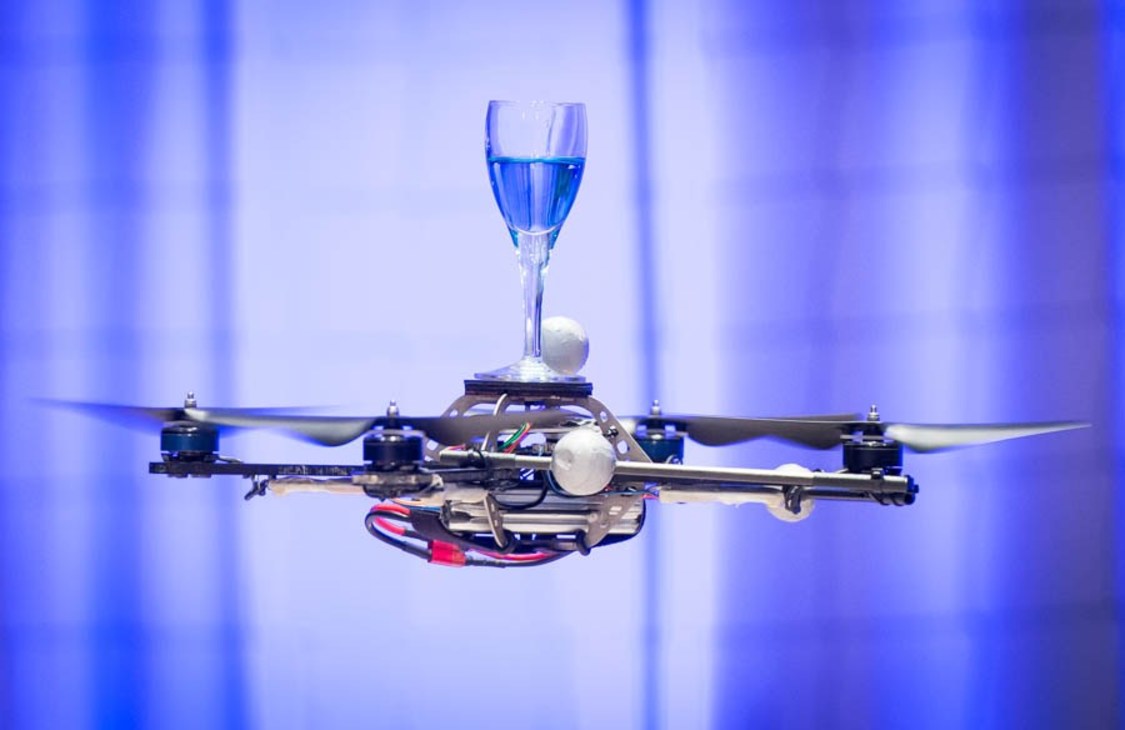
 Drone equilibrando copo d'água
Drone equilibrando copo d'águaObservem como o ‘quad’ perdeu altitude quando coloquei este copo de água nele. Diferente da haste equilibrada, não incluí o modelo matemático do copo no sistema. De fato, o sistema nem mesmo sabe que o copo de água está lá. Como antes, eu posso usar o ponteiro para dizer ao ‘quad’ onde quero que ele esteja no espaço. Ok, vocês devem estar se perguntando: por que a água não cai do copo? Dois fatores: o primeiro é que a gravidade age em todos os objetos da mesma maneira. O segundo é que os propulsores estão todos apontando para a mesma direção que o copo,
apontando para cima. Você coloca essas duas coisas juntas, o resultado líquido é que todas as forças laterais no copo são pequenas e estão dominadas principalmente pelos efeitos aerodinâmicos, que nestas velocidades são insignificantes. E é por isso que você não precisa modelar o copo. Ele naturalmente não derrama, Não importa o que o ‘quad’ faça.
A lição aqui é que algumas tarefas de alto desempenho são mais fáceis que outras, e entender a física do problema mostra quais são fáceis
e quais são difíceis. Neste exemplo, carregar um copo de água é fácil. Equilibrar uma haste é difícil. Todos nós ouvimos histórias de atletas executando proezas quando estão fisicamente machucados. Uma máquina também pode manter o desempenho com dano físico extremo? A sabedoria convencional diz que você precisa de, no mínimo, quatro motores propulsores para voar, porque há quatro graus de liberdade para controlar: rolagem, arfagem, guinada e aceleração. Hexacópteros e octocópteros, com seis e oito propulsores, podem oferecer redundância, mas quadricópteros são muito mais populares porque têm o número mínimo de motores propulsores fixos: quatro. Têm mesmo?
Danificando o drone
Se analisarmos o modelo matemático desta máquina com apenas dois propulsores funcionando, descobriremos que há uma forma não convencional de fazê-la voar. Abandonamos o controle da guinada, mas rolagem, arfagem e aceleração ainda podem ser controladas com algoritmos que exploram
essa nova configuração. Os modelos matemáticos nos dizem exatamente quando e por que isso é possível. Neste exemplo, este conhecimento
nos permite projetar novas arquiteturas da máquina ou projetar algoritmos espertos que sutilmente lidam com o dano, exatamente como os atletas humanos fazem, em vez de construir máquinas com redundância.
Não conseguimos deixar de prender a respiração quando vemos um mergulhador dar saltos mortais rumo à água, ou quando o saltador está girando no ar, o chão se aproximando rápido. O nadador conseguirá fazer uma boa entrada na água? O saltador cairá em pé? Suponha que queiramos que este ‘quad’ aqui dê três voltas e termine no exato local em que estava. Esta manobra vai acontecer tão rapidamente que não dá para usar ‘feedback’ para corrigir o movimento durante a execução. Simplesmente não há tempo bastante. Assim, o que o ‘quad’ pode fazer é realizar a manobra cegamente, observe como ele finaliza a manobra, e então usa essa informação para modificar seu comportamento para que a próxima volta seja melhor.
Parecido com o nadador e o saltador, é apenas através da prática repetida que a manobra pode ser aprendida e executada no mais alto padrão. Bater numa bola em movimento é uma habilidade necessária em muitos esportes. Como fazemos uma máquina desempenhar o que um atleta faz
aparentemente sem esforço?
Drone tenista
 Drone jogador de tênis
Drone jogador de tênisEste ‘quad’ tem uma raquete presa em seu topo com um ponto ideal do tamanho de uma maçã, portanto não muito grande. Os cálculos a seguir são feitos a cada 20 milissegundos, ou 50 vezes por segundo. Primeiro descobrimos aonde a bola está indo. Então, a seguir, calculamos como o ‘quad’ deve atingir a bola para que ela volte para onde ela foi atirada. Terceiro, é calculada uma trajetória que leve o ‘quad’ de seu ponto atual até o ponto de impacto com a bola. Quatro, executamos somente 20 milissegundos dessa estratégia. 20 milissegundos mais tarde, todo o processo é repetido até que o ‘quad’ atinja a bola.
As máquinas podem realizar manobras dinâmicas não apenas sozinhas mas também coletivamente. Estes três ‘quads’ estão carregando em conjunto uma rede. Eles realizam uma manobra extremamente dinâmica e em conjunto para lançar a bola de volta para mim. Observem que, com a rede completamente estendida, estes ‘quads’ estão na vertical. De fato, quando completamente estendida, isso é cerca de cinco vezes maior do que a sensação de um bungee jump no final do salto. Os algoritmos para fazer isto são muito semelhantes ao que um único ‘quad’ usaria para mandar a bola de volta para mim. Modelos matemáticos são usados para replanejar continuamente uma estratégia conjunta 50 vezes por segundo. Tudo que vimos até agora foi sobre as máquinas e suas capacidades.
Kinect e Drone
O que acontece quando emparelhamos o atletismo desta máquina com aquele do ser humano? O que tenho diante de mim é um sensor de movimentos comercial, usado principalmente em jogos. Ele pode reconhecer o que várias partes do meu corpo estão fazendo em tempo real.
Parecido com o ponteiro que usei antes, podemos usar isso para enviar informações ao sistema. Agora temos uma forma natural de interagir com o atletismo destes ‘quads’ com meus movimentos.
Interação física com o drone
 Interagindo fisicamente com drone
Interagindo fisicamente com droneA interação não tem que ser virtual. Ela pode ser física. Veja este ‘quad’, por exemplo. Está tentando permanecer em um ponto fixo no espaço. Se tento tirá-lo do caminho, ele compete comigo, e se move de volta para onde quer estar. Entretanto, podemos modificar esse comportamento.Podemos usar modelos matemáticos para estimar a força que estou aplicando no ‘quad’. Quando conhecemos essa força, podemos também mudar as leis da física, no que toca ao ‘quad’, claro.
Aqui o ‘quad’ está se comportando como se estivesse em um fluido viscoso. Agora temos uma maneira familiar de interagir com uma máquina. Vou usar essa nova capacidade para posicionar este ‘quad’, que carrega uma câmera, no local adequado para filmar o restante desta demonstração. Assim podemos interagir fisicamente com estes ‘quads’ e podemos alterar as leis da física. Vamos nos divertir um pouquinho com isto.
Para o que verão a seguir, estes ‘quads’ inicialmente vão se comportar como se estivessem em Plutão. À medida que o tempo passa, a gravidade será aumentada até que estejamos de volta ao planeta Terra, mas asseguro que não chegaremos lá.
Agora estão todos pensando: esses caras estão se divertindo demais, e também, provavelmente, estão se perguntando: exatamente por que estão
construindo máquinas atletas? Alguns presumem que o papel dos jogos no mundo animal é aprimorar habilidades e desenvolver capacidades. Outros acham que tem mais a ver com o papel social, que são usados para unir o grupo. De forma similar, usamos a analogia dos esportes e do atletismo para criar novos algoritmos para máquinas a fim de levá-las ao limite. Que impacto terá a velocidade das máquinas em nosso modo de vida? Como todas nossas criações e inovações passadas, elas podem ser usadas para melhorar a condição humana ou podem ser mal usadas ou se tornar abusos.
Esta não é uma escolha técnica que enfrentamos; é uma escolha social. Façamos a escolha certa, a escolha que traga o melhor no futuro das máquinas, exatamente como, nos esportes, o atletismo pode revelar o melhor em nós. Permitam-me apresentar os magos atrás da cortina verde. Eles são os membros atuais da equipe de pesquisa _Flying Machine Arena_. Federico Augugliaro, Dario Brescianini, Markus Hehn, Sergei Lupashin, Mark Muller e Robin Ritz. Olho neles. Estão destinados a grandes coisas.
Obrigado.
